Roboterhandling
Das FUCO-HEG Roboterhandling mit jedem gewünschten Robotertyp (KAWASAKI, KUKA, ABB, FANUC oder YASKAWA MOTOMAN) besteht aus dem Roboter, der Werkstückaufnahmevorrichtung und der zugehörigen Steuerung. Auch diese Steuerung des Roboters ist als FUCO-HEG Offline-Programmiersystem verfügbar und bietet somit dem Anwender die Möglichkeit, auch ohne spezielle Roboterkenntnisse eine einfache Programmierung des Roboters vorzunehmen.
Ein nicht unerheblicher Vorteil dieses Systems ist, dass sich die sensiblen Bewegungseinheiten nicht unterhalb des feuchten und tropfenden Werkstückes bewegen, sondern außerhalb des Tropfbereiches angeordnet sind.

Fußputzeinrichtung
Über ein anfahrbares Schwammrollensystem werden spezielle Bereiche nach dem Glasieren von Glasur gereinigt. Der Fußputz wird über ein selbstreinigendes Schwammscheibensystem erreicht

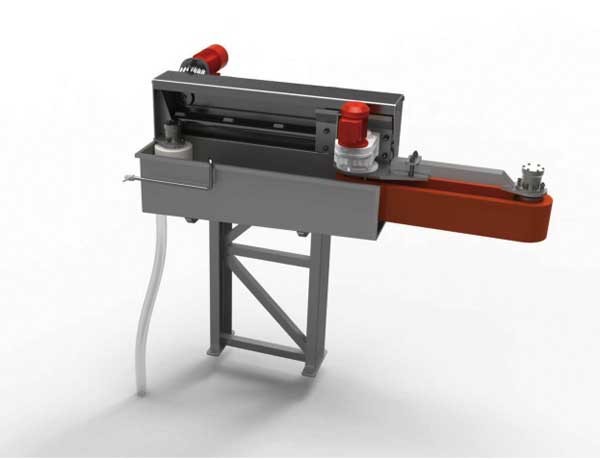
Ventilputz
Über ein anfahrbares Schwammband werden spezielle Bereiche nach dem Glasieren von Glasur gereinigt. Der Siphonanschluss wird über ein selbst-reinigendes Schwammbandsystem gereinigt.
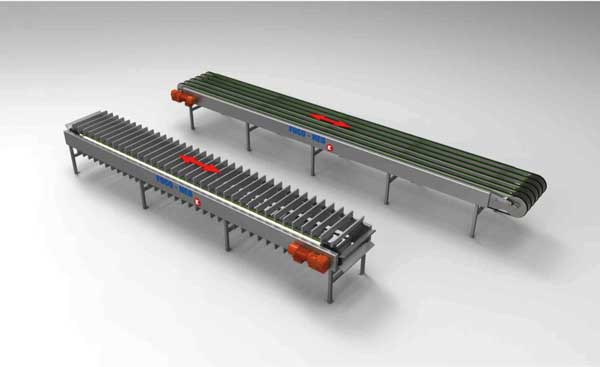
Stab- und Riemenförderer
Glasierte Werkstücke werden vom Umsetzer entnommen und der Förderanlage zur Ofenbeladung zugeführt. Das Transportsystem ist als Taktfördersystem ausgelegt und wird durch einen elektrischen Getriebemotor mit frequenzgesteuerter Drehzahl angetrieben. Über entsprechende Sensorik wird eine positionsgenaue Taktung ermöglicht.